制振要素
制振要素
減衰要素(非線形要素、マクスウェル要素)については求められた要素力を節点力として運動方程式に与えて解きます。したがって、運動方程式には減衰要素を構成するダンパーまたはバネは、減衰あるいは剛性マトリクスには加算されません。
マクスウェル要素
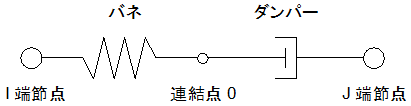
連結点でのバネとダンパーの力の釣合い条件と、連結点の変位と速度の関係を陽的に仮定します。求められた要素力を節点力として運動方程式に与えて解くものとします。
- 運動方程式
時刻 $t+\Delta t$での運動方程式を表すと、次式となります。ここで、マクスウェル要素の節点力を $M {}_F$とします。
$M ^{t+\Delta t}\ddot{U}$ + $C {} ^{t+\Delta t} \dot{U}$ + $K {} ^{t+\Delta t}U$ + ${} ^{t+\Delta t}{_mF}$ = ${} ^{t+\Delta t}R$
これを増分形で表すと、下式になります。
$M ^{t+\Delta t} \ddot{U}$ + $ ^tC \Delta \dot{U}$ + ${} ^tK{\Delta U}$ = ${} ^{t+\Delta t}R$ - $ _s^tF$ - $ _d^tF $ - $ ^{t+ \Delta t}F _m$ + $^{t+ \Delta t}R _{umb}$
上式の ${}^{t+\Delta t}R _{umb}$は不平衡力です。
- マクスウェル要素の計算
マクスウェル要素の相対変位と相対速度の関係は次式となります。
$U_{ij} = U_{i0} + U_{0j}$ $\dot{U_{ij}} = \dot{U_{i0}} + \dot{U_{j}}$ここで、
$U_{ij}$:
$i-j$の相対変位
$U_{i0}$: $i-0$の相対変位
$U_{0j}$: $0-j$の相対変位
$\dot{U_{ij}}$: $i-j$の相対速度
$\dot{U_{i0}}$: $i-0$の相対速度
$\dot{U_{0j}}$: $0-j$の相対速度
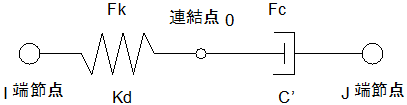
連結点0の力の釣合いは次式となります。バネ力を $F_k$、ダンパー力を $F_c$、マクスウェル要素力を $F_{ij}$とします。
$F_k = F_c = F_{ij}$バネ力は線形を仮定し、次式で定めます。ここで、バネの初期剛性を $K_d$とします。
$F_k = K_d (U_{ij} - U_{0j})$ダンパー力は非線形なので次式となります。 $C^{'}$は接線減衰係数となります。
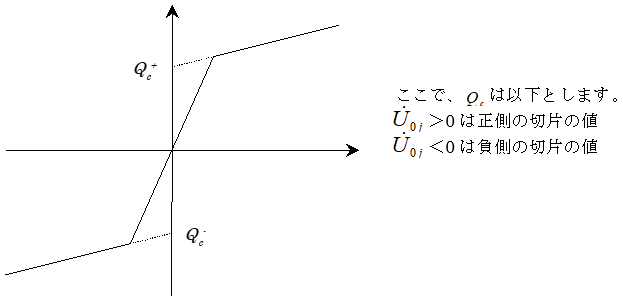
ここで、 $Q_c$は以下とします。
$\dot{U_{0j}} > 0$は正側の切片の値
$\dot{U_{0j}} < 0$は負側の切片の値
よって、連結点の釣り合い条件は式7.6.1.5に式7.6.1.6、式7.6.1.7を代入し、次のようになります。
$K_d (U_{ij} - U_{0j}) = C^{'} \dot{U_{0j}} + Q_c$時間刻みが十分小さい場合、時刻の速度を-からまでの平均速度で近似すれば、時刻び速度は次式で表されます。
${}^t \dot{U_{0j}} = \frac{\Delta ^tU_{0j}}{\Delta t}$ここで、 ${}^t \dot{U_{0j}}$:時刻の0-jの相対速度
${}^t \dot{U_{0j}}$:時刻の0-jの相対変位の増分
$\Delta ^t \dot{U_{0j}}$:時刻刻み
代入すれば、次式のとなります。
$K_d(U_{ij} - U_{0j}) = C^{'} \frac{\Delta ^tU_{0j}}{\Delta t} + Q_c$また、時刻の相対変位を時刻-と増分の和で表すと、次式となります。
${}^tU_{0j} = {}^{t-\Delta t}U_{0j} + \Delta^tU_{0j}$上式を $\Delta \dot{U_{0j}}$についてまとめると、次式となります。
$K_d {}^tU_{ij} - K_d {}^tU_{0j} = C^{'} \frac{\Delta^tU_{0j}}{\Delta t} + Q_c$ $K_d {}^tU_{ij} - K_d ({}^{t-\Delta t}U_{0j} + \Delta^tU_{0j}) = C^{'} \frac{\Delta^tU_{0j}}{\Delta t} + Q_c$ $K_d ({}^{t-\Delta t}U_{0j} - \Delta^tU_{0j}) - K_d \Delta^tU_{0j} = C^{'} \frac{\Delta^tU_{0j}}{\Delta t} + Q_c$ $(\frac{C^{'}}{\Delta t} + K_d) \Delta^tU_{0j} = K_d ({}^t \Delta U_{ij} - {}^{t-\Delta t}U_{0j}) - Q_c$ $\therefore \Delta^tU_{0j} = \frac{K_d({}^tU_{ij} - {}^{t-\Delta t}U_{0j}) - Q_c}{C^{'}/\Delta t + K_d}$代入すれば ${}^tU_{0j}$が求まります。時刻 $t$の $0‐j$の相対速度についてまとめると、次式となります。
${}^tU_{0j} = \frac{K_d({}^tU_{ij} - {}^tU_{0j}) - Q_c}{C^{'}}$したがって、連結点0の変位 ${}^tU_0$と速度 ${}^t \dot{U_0}$は次式で求まります。
${}^tU_0 = {}^tU_j + {}^tU_{0j}$ ${}^t \dot{U_0} = {}^t \dot{U_j} + {}^t \dot{U_{0j}}$日鉄住金関西工業(株)SUB(Steel-Unbuckling-Brace/鋼製座屈拘束ブレース)
SUBの履歴特性は標準型とします。
各項目の詳細につきましては、日鉄住金関西工業(株)の技術資料をご参照ください。
a) SLY100
(1) 完全弾塑性モデル
$P$:第1折れ点耐力
$P = P_y・\phi$$P_y$:ブレースの降伏軸力
$P_y = Ab・\sigma _y$$A_b$:ブレース芯材の軸部断面積
$σ_y$:ブレース芯材の降伏応力度
$φ$:ブレースの耐力上昇率
$\phi = P / P_y$$P$:耐力上昇を起こした時の軸力(軸耐力)
$K1$:ブレースの弾性剛性より求めた等価剛性
(2) トリリニアモデル
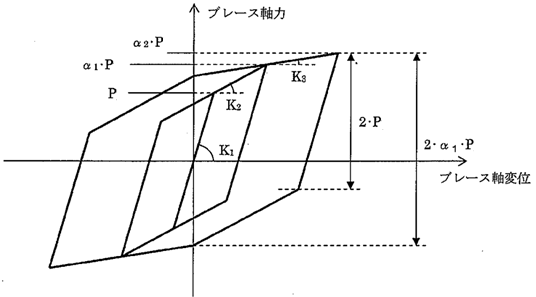
入力省略時の各パラメータ
| α1 | α2 | K2/K1 | K3/K1 | |
|---|---|---|---|---|
| 値 | 2.00 | 2.50 | 0.06 | 0.02 |
※トリリニアモデルの適用範囲は2.5・Pyまでです。
b) SLY225・SN400B・SN490B
(1) バイリニアモデル
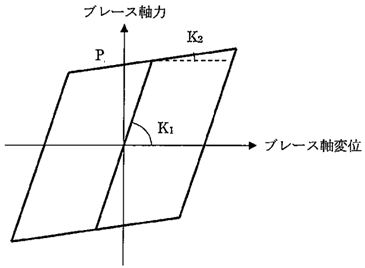
$P$:第1折れ点耐力(= $Py・φ$)
$K_1$:ブレースの弾性剛性より求めた等価剛性
$K_2$: $0.03・K_1$
日鉄エンジニアリング株式会社 アンボンドブレース
アンボンドブレースの履歴特性は標準型バイリニアとします。
詳細につきましては、日鉄エンジニアリングの技術資料をご参照ください。
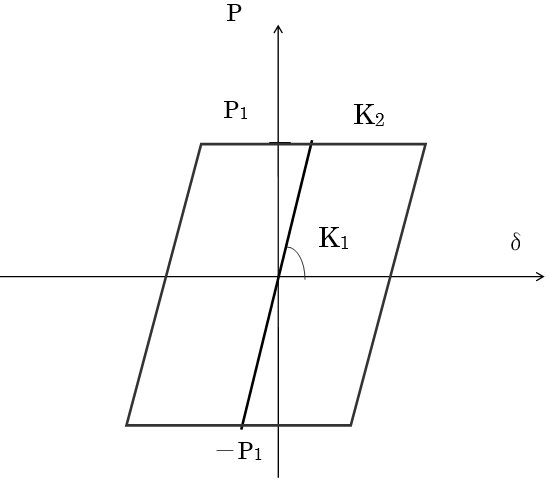
$P_1$:折れ点耐力(デフォルト = $Ac×F×1.1$)
$Ac$:アンボンドブレースの塑性化部断面積
$K1$:ブレースの1次剛性(等価剛性)
$\phi_A = \frac{E \times Ac}{L}$$φ_A$:パネルゾーン・ブレース弾性部などを考慮した等価剛性倍率
$K2$:ブレースの2次剛性
= K1×剛性低下率 (デフォルト 0.0)

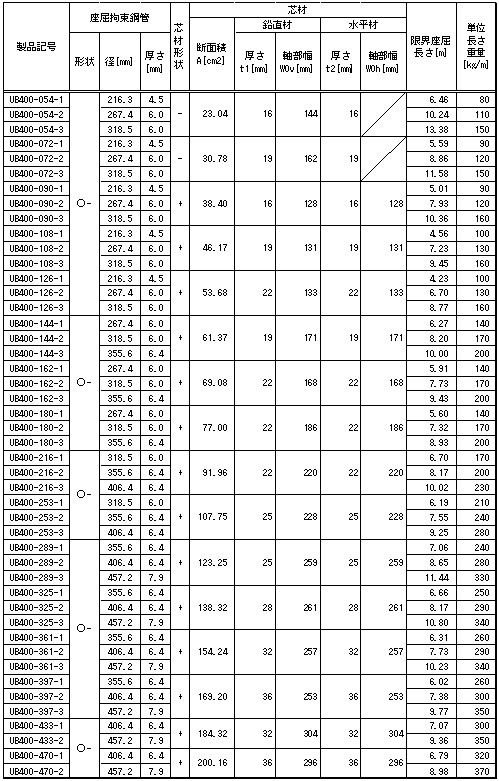
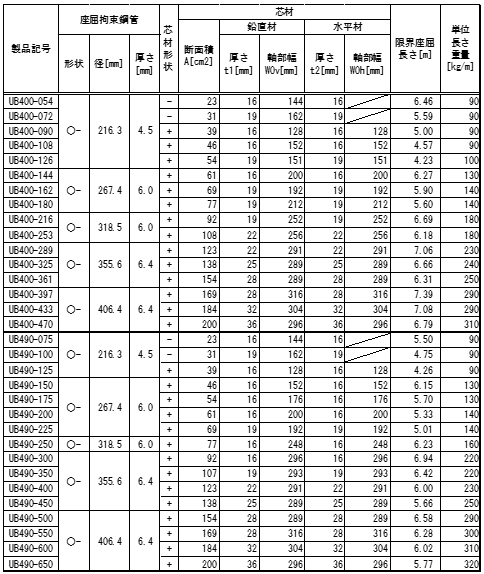
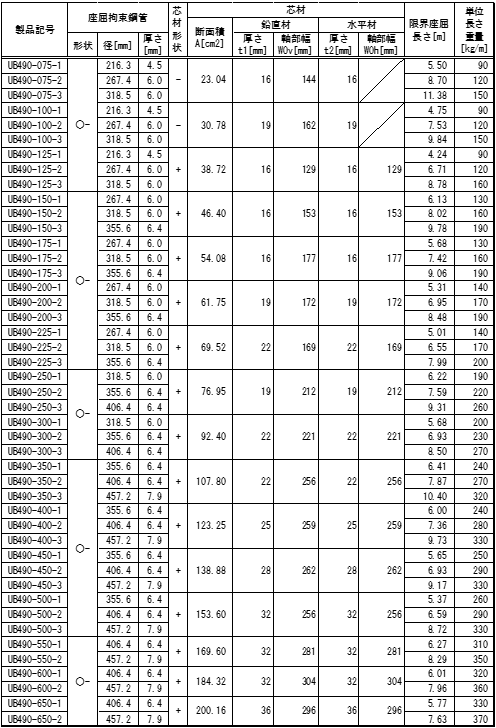
アンボンドブレース(耐震タイプ)一覧
メーカー資料より
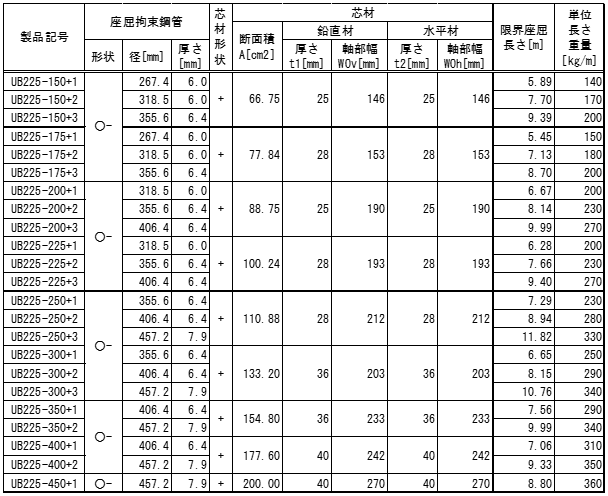
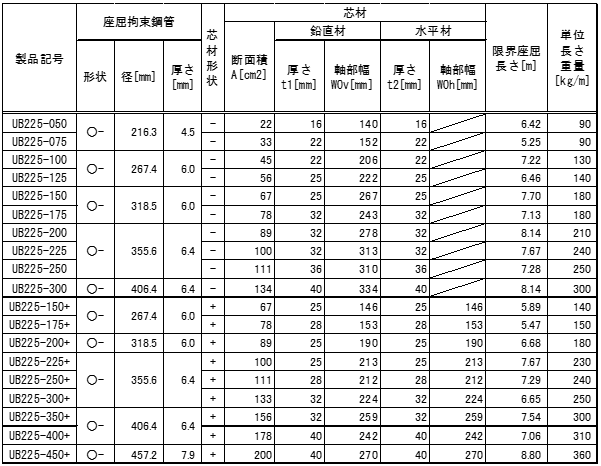
○アンボンドブレース(制振タイプ)は下表の通りです。
アンボンドブレース(制振タイプ)一覧
メーカー資料より

日鉄エンジニアリング株式会社 ユニットゴムダンパー
a) 簡易モデル
本粘性ダンパーを、修正HDモデルによりモデル化します。
修正HDモデルは、土の非線形特性を表す履歴モデルとしてよく用いられているHardin-Drnevich(HD)モデルを基に、付加線形バネKaを考慮したものです。
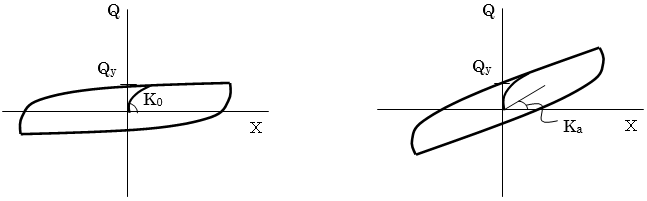
HDモデル 修正HDモデル
(1) 等価剛性 keq(kN/mm)
$$k_{eq} = G_{eq} \times \frac{s}{d}$$$G_{eq}$:等価せん断弾性係数(kN/mm2)
$$G_{eq} = 0.84 \times \gamma^{-0.5}$$ (0.1≦γ≦3.0)
$γ$:歪み
$s$:せん断面積(mm2)
$d$:厚さ(mm)
(2) 等価粘性減衰定数 $h_{eq}$
$$h_{eq} = -0.018 \times \gamma^2 + 0.079 \times \gamma + 0.21$$ (0.1≦γ≦3.0)
(3) 一次剛性 $k_u$(kN/mm)
$$k_u = \beta \times k_{eq}$$(4) (1)~(3)より、降伏荷重特性Qy、初期戻り剛性 $K_0$、付加線形バネ係数 $K_a$を求めます。履歴ループから求まる最大点(Xm,Qm)から最小点(-Xm,-Qm)へ向かう下降曲線と逆の上昇曲線を貸し気で求めます。
$$Q = 2F(X/2-X_m / 2) + Q_m$$ :下降曲線
$$Q = 2F(X/2-X_m / 2) - Q_m$$ :上昇曲線
$$F(X) = X/(1/X_0 + X/Q_y) + K_a \times X$$(5) 以降、その時点での歪に応じて、①~④により履歴ループを逐次算出します。
b) 高精度モデル
(1) 振動モデル
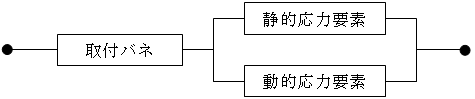
取付バネを考慮し、下図に示すモデルとします。
(2) 静的・動的応力要素の変形( ${}_t \delta _e$)
$${}_t \delta _e = {}_t \delta - \frac{{} _{t-1}Q}{k _g}$$${}_t \delta$:時刻tの要素間変形
${}_{t-1}Q$:時刻t-1の要素力
${k_g}$:取付バネの剛性
(3) 静的応力要素
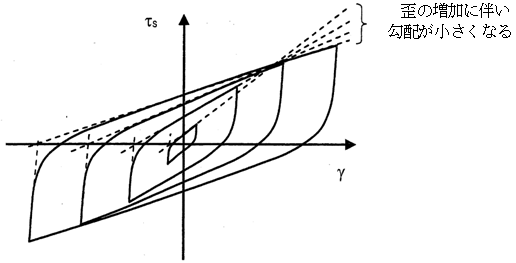
静的応力要素の履歴特性は、下図に示すように、鋼材と類似する紡鍾型であり、鋼材の履歴の再現に用いられるMenegotto-Pintoモデルを採用します。
(4) 動的応力要素
歪・温度・振動数依存性を再現するため、動的応力要素は、下図に示す粘弾性要素と、非線形粘性要素の並列体で表現します。
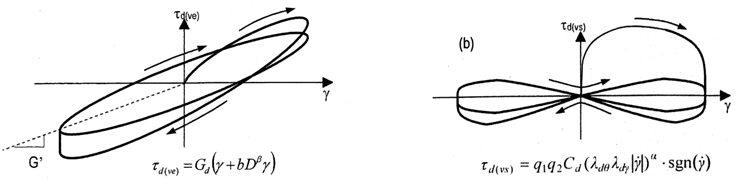
粘弾性要素 非線形粘性要素
参考文献:笠井和彦,西澤恵二,大木洋司,田中克往、田中和宏,西本晃治,山崎久雄, 「制振用高硬度ゴムの静的・動的積載実験と時刻歴解析法」, 日本建築学会構造系論文集 Vol.76 No.662
(株)免制震ディバイス RDTダンパー
(1) 軸方向に関する抵抗力
RDTの軸方向に発生する全抵抗力 $P_n$は、RDTの逆効率および正効率を考慮した等価摩擦係数λを介して次式で与えられる。
$$P_n = λ(αQ_v + Q_i + Q_f)$$ ・・・(1)
$P_n$ :RDT の軸方向に発生する全抵抗力(kN)
$λ$ :逆効率および正効率を考慮した等価摩擦係数
$Q_v$ :粘性抵抗力による軸方向力(kN)
$α$ :粘性抵抗力の繰り返しによる低下率
$Q_i$ :回転慣性による軸方向力(kN)
$Q_f$ :静止摩擦による軸方向力(kN)
(2) 粘性抵抗力による軸方向力
粘性抵抗力による軸方向力 $Q_v$は次式で与えられる。
$$Q_v = S・η(V_n,t)・V_s・A$$ ・・・(2)
S :内筒の増幅幅
$η(V_n,t)$:見かけの粘度
$Vs$ :せん断歪速度(1/s)
$t$ :粘性体温度(℃)
$A$ :せん断有効断面積(cm2)
ここに、
$$ V_s = \frac{(S・ \dot{x_n})}{dy} \times 10$$ ・・・(3)
$$η(V_n,t)=\frac{η_t}{(1 + b|V_s|^{\beta})} \times 10^{-10}$$ ・・・(4)
$\dot{x_n}$:軸速度(cm/s)
$d_y$ :せん断隙間(mm)
$η_t$:粘性体温度t℃時の粘度(cSt)
$b,β$ :見かけの粘度を計算する係数
粘性抵抗力の繰り返しによる低下率αは次式で与えられる(初期値:α=1)。
ただし0.7≦α≦1.0
$$\alpha = \frac{1}{(1 + a_1 \frac{E_V}{V_V})^{a2}}$$ ・・・(5)
$E_v$ :粘性抵抗力による累積吸収エネルギー量(j)
$V_v$ :粘性体の充填されている容積(cm3,cc)
$a_1$, $a_2$ :補正係数
ここに、
$$E_v = \frac{1}{2} \Sigma$$$$(α \cdot \Delta Q_v)(\Delta X_n)$$ ・・・(6)
$x_n$ :軸変位(cm)
$i$ :ステップ番号
(3) 回転慣性による軸方向力
回転体の慣性力による軸方向力 $Q_i$は次式で与えられる。
$$Q_i=I \cdot (\frac {2π}{L_d})・\ddot{x_n} × 10^2$$ ・・・(7)
$I$ :回転慣性モーメント(kN・cm・ s2)
$Ld$ :リード長(mm)
$\ddot{x}_n$:軸加速度(cm/s2)
(4) 静止摩擦による軸方向力
静止摩擦による軸方向力Qfは次式で与えられる。
$$Q_f = Q_{si} + Q_{RB}$$ ・・・(8)
$Q_{si}$ :シール材の摩擦による軸方向力(kN)
$Q_{RB}$ :ラジアルベアリングの摩擦による軸方向力(kN)
ここに、
$$Q_{si} = S \cdot (2・2π・r_v・μ_{si})$$ ただし $Q_{si}$は粘性抵抗力 $α_v$と同符号 ・・・(9)
$$Q_{RB} = S_{RB}・\mu_{RB}・W$$ ただし $Q_{RB}$粘性抵抗力 $αQ_v$と同符号 ・・・(10)
$r$:内筒外半径(mm)
$μ_{si}$:内筒外半径(mm):シール材の単位長さ当たりの摩擦力(kN/mm)
$S_{RB}$:ラジアルベアリングの増幅率
$μ_{RB}$:ラジアルベアリングの摩擦係数
$W$ :ラジアルベアリングが支える重量(kN)
(株)免制震ディバイス 粘性制震壁
住友理工 TRCダンパー
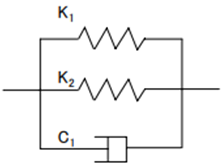
振動解析時のモデルは下記の4要素モデルで計算します。静的解析モデルの場合、K2のばねのみ考慮し、非線形を考慮した場合にはK2のBi-linearばねとしてモデル化します。
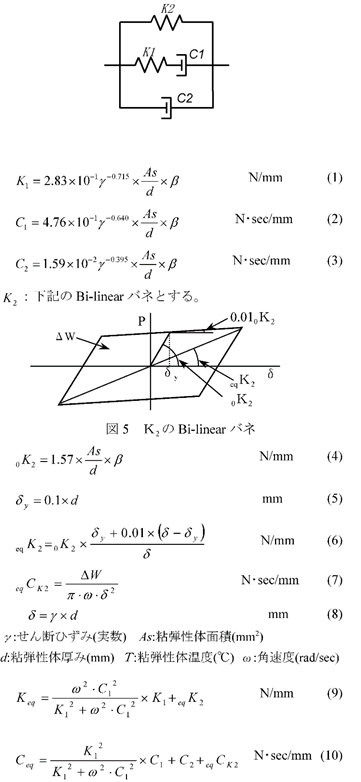
参考文献:夏堀・千田ほか
「スチレンオレフィン糸粘弾性体を用いた壁型ダンパーの開発、その1~3」
日本建築学会大会学術講演梗概集(2005 年9 月)、21460~21462
JFEシビル株式会社 二重鋼管座屈補剛ブレース
二重鋼管座屈補剛ブレースの履歴特性は標準型バイリニアもしくは辻・山田モデルとします。辻・山田モデルの詳細は「7.8.6辻・山田モデル」に示します。
JFEシビル株式会社 制振間柱
制震間柱の履歴特性はJFE LY トリリニアとします。JFE LY トリリニアの詳細は「7.8.7JFE LYトリリニア」に示します。
JFEシビル株式会社 間柱型粘弾性ダンパー
JFEシビル間柱型粘弾性ダンパーの構成則を以下に示します。第1項は過去に経験した最大せん断ひずみによって剛性が低下するダメージ効果を考慮した非線形ばねを、第2、3 項は塑性項を、第 4 項は Maxwell の粘弾性項を表します。第 2、3 項も過去に経験した最大せん断ひずみによって剛性や減衰が低下するダメージの効果を考慮しています。 $γ_{max}$は過去に経験した最大のせん断ひずみを、Γ はせん断ひずみの変化の絶対値|Δγ|の累積値を表します。
$$\tau(\gamma)= \left(\theta _e + (1 - \theta _e)e^{-\gamma _{max}/\alpha _e} \right) g_e \gamma + \left(\theta _p + (1 - \theta _p)e^{-\gamma _{max}/\alpha _p} \right) g_{p1} \int _\theta^f e^{-(\Gamma-\Gamma^{'})/l_1} \frac{d \gamma^{'}}{d \Gamma^{'}}d \Gamma^{'}$$表2.1 パラメータの同定結果(温度20℃)
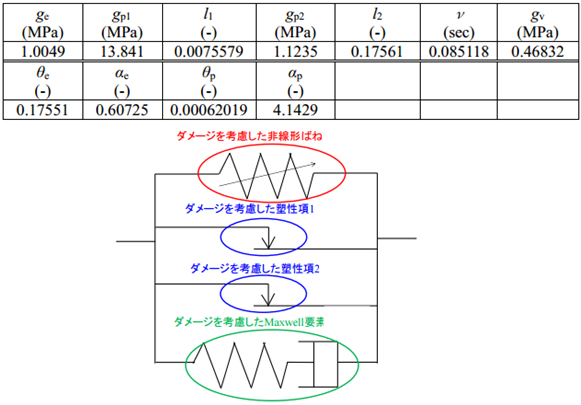
ダンパーモデルの概念図
ばらつきは以下のように考慮します。
$$X = x[1-0.026784(y^{2.2481}-1)(y-1.3666)]、Y = y[1-0.026784(y^{2.2481}-1)(y-1.3666)]$$また、温度によるばらつきは、以下のように計算して、上記ばらつきx,yに考慮します。
$$\alpha _T = -9.029 \times 10^{-5}T^2 - 1.668 \times 10^{-2}T + 1.3697$$ $$\beta _T = -2.108 \times 10^{-4}T^2 + 5.958 \times 10^{-3}T + 0.9652$$参考文献:櫻井祐ほか:高減衰ゴムを用いた間柱型粘弾性ダンパー ~その5 性能変動を考慮できる履歴モデル~, 日本建築学会大会学術講演梗概集(東北)2018.9
コンステック CSTダンパー
弾塑性要素、弾性要素、粘性要素から成る三要素モデルとしてモデル化されます。ダンパー部は住友ゴム工業株式会社製粘弾性ダンパー(GR100)でモデル化します
住友ゴム工業 GRASTダンパー
弾塑性要素、弾性要素、粘性要素から成る三要素モデルとしてモデル化されます。
(1)弾塑性要素
静的の加振実験結果から、弾塑性要素の履歴特性を下図のように設定します。
骨格曲線:
$\tau _1 = G_r・\gamma^{\varphi}$(N/mm2)
$τ$ =せん断応力度(τ=F/S)
$γ$ =高減衰ゴムのせん断歪み(γ=δ/t)
$F$ =せん断力
$S$ =高減衰ゴムの断面積
$t$ =高減衰ゴムの厚さ
$δ$ =せん断変形
骨格曲線の勾配も歪み依存であり、 $ks = G_r \cdot \varphi \cdot \gamma^{\varphi-1}$ となります。原点付近ではその勾配が無限大となって定義できないため、極微小の歪み0.001までは線形とします。
除荷後の再降伏曲線は、骨格曲線と比例するように設定します。
再降伏曲線:
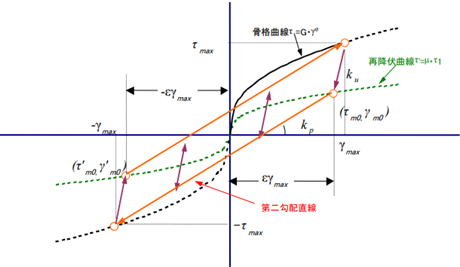
$${\tau _1}^{'} = \mu・\tau _1 = \mu・G_r・\gamma^{\varphi}$$過去の最大せん断歪みγmaxを超えない除荷と再載荷は、下図に示すノーマルバイリニア復元力特性を描きます。 骨格曲線から除荷した点は、最大せん断応力度と最大せん断歪み(τmax、γmax) となります。再降伏曲線まで除荷すると、反対側の最大点(-τmax、-γmax)を指向して直線上を再載荷します。除荷勾配ku および第二勾配kp を決めるために、下図に示す除荷カーブの折れ点(τm0、γm0)、つまり、最降伏曲線と第二勾配直線の交差点でせん断歪みγm0は次のように仮定します。
$$\gamma _{m0} = \varepsilon・\gamma _{max}$$ここで、εを次式のように定義します。
$$\varepsilon = \frac{0.94}{1+0.01・\gamma _{max}^{-0.73}}$$交差点(τm0、γm0)は、再降伏曲線上なのでせん断応力度τm0は次のように計算できます。
$$\tau _{m0} = \mu・G_r・\varepsilon^{\varphi} \gamma _{max}^{\varphi} = \mu・\varepsilon^{\varphi} \gamma _{max}$$したがって、除荷カーブの勾配 kuおよび第二勾配 kpは次のように決まります。
$$k_u = \frac{\tau _{max} - \tau _{m0}}{\gamma _{max} - \gamma _{m0}} = \frac{1 - \mu・\varepsilon^{\varphi}}{1 - \varepsilon}・\frac{\tau _{max}}{\gamma _{max}}$$ $$k_p = \frac{\tau _{max} + \tau _{m0}}{\gamma _{max} + \gamma _{m0}} = \frac{1 + \mu・\varepsilon^{\varphi}}{1 + \varepsilon}・\frac{\tau _{max}}{\gamma _{max}}$$正側交差点(τm0、γm0)から負側の最大点(-τmax、-γmax)に向く第二勾配直線:
$$\tau = -\tau _{max} + k_p(\gamma + \gamma _{max}) = \tau _{max}・\left[ \frac{1+\mu・\varepsilon^{\varphi}}{(1+\varepsilon)・\gamma _{max}}・\gamma-1 + \frac{\mu・\varepsilon^{\varphi}}{1+\varepsilon)} \right]$$負側交差点(τ’m0、γ’m0)から正側の最大点(τmax、γmax)に向く第二勾配直線:
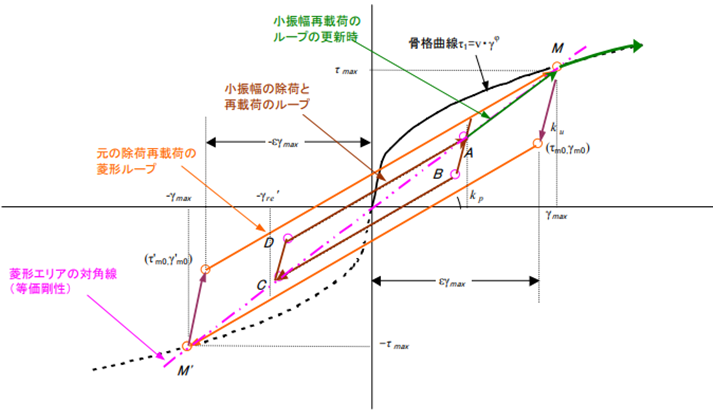
$$\tau = \tau _{max} + k_p(\gamma - \gamma _{max}) = \tau _{max}・\left[ \frac{1+\mu・\varepsilon^{\varphi}}{(1+\varepsilon)・\gamma _{max}}・\gamma+1 - \frac{\mu・\varepsilon^{\varphi}}{1+\varepsilon)} \right]$$また、大変形を経験した後の小振幅に対しては下図に示すように、経験最大歪みより得られる菱形ループの対角線(等価剛性)が同じとなる相似形の菱形ループ上を通ります。また、その小振幅の菱形ループから経験最大歪みの菱形ループまで変形が大きくなるときは、等価剛性上をたどります。さらに経験最大歪みを更新するときは、骨格曲線上をたどります。
(2)弾性要素
振動数依存性を考慮した加振実験結果との割線剛性の差を、振動数の増加による付加される剛性として弾性要素で表現します。弾性要素は、実験結果より振動数に依存するこが確認されているため、ダンパー設置前の建物の固有振動数をパラメータとした係数α1 を定めて付加される剛性を表現します。また、弾性要素は経験した最大歪みγ max の依存性を表現し、経験最大歪み以下の小振幅の場合は、その最大歪み時の剛性を保持するように弾性剛性を設定します。
$$\gamma _{max} \leq \gamma _2 \tau _2 = \xi \cdot \gamma$$ $$\gamma _{max} \geq \gamma _2 \tau _2 = \varsigma・\gamma / \gamma^{\psi} _{max}$$γ2は剛性が歪みに依存しない最大歪みの境界値、γ2=0.005 とします。
(3)粘性要素
静的加振以外の加振実験結果より切片応力を求め、その差を加振振動数の増加により付加される応力として粘性要素で表現します。粘性要素の振動数依存性と歪み依存性を歪み速度νで下式のように表現します。
また、粘弾性ダンパーに用いた粘弾性体は、大変形を経験した後、反転時の歪みが同じであっても応力の減少が確認されています。先に算出した弾塑性要素、弾性要素は、経験最大歪みから得られる特性でその応力の減少を表現しています。一方、粘性要素は 歪み速度に用いて表現しているため、経験最大歪みと漸減時振幅の比の関数となる大変形経験後の係数α2 を求める近似式として下式を定義し、その係数をかけて粘性要素の応力の調整をします。
$$\tau _3 = \omega・\nu^{\theta}$$ $$\alpha _ 2 = A・|\gamma _u / \gamma _{max}|^B + C$$(4)初期および未経験領域加振時の応力の増大に対する対応
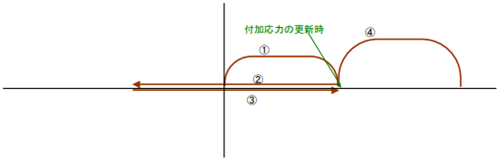
初期剛性を除去した製品においても初期および未経験領域加振時の応力の増大が確認されています。その応力の増大(付加応力)を速度べき乗型の粘性ダッシュポットとして表現します。
初期および未経験領域加振時 :
$$\tau _4 = \omega _4・\nu^{\theta _4}$$経験領域加振時 :
$$\tau _4 = 0$$なお、この付加応力は歪みを新たに更新するときに生じますが、経験最大歪みγmax を超えてときに突然応力がそのときの歪み速度により増大するのではなく、最大歪みγmax から(1+φ1) γmaxまでの区間は、正弦波の形で付加応力を増大させます。
AFTダンパーシステム
ダンパー、曲げバネ、軸力伝達要素、支持柱から構成されます。ダンパー部は住友ゴム工業株式会社製粘弾性ダンパー(GR100、GR400)でモデル化します。
参考文献:
軸力伝達機構を有する粘弾性ダンパーシステムを用いた工法開発に関する研究
その1.粘弾性ダンパーシステムに対する二軸載荷試験の結果
その2.粘弾性ダンパーシステムを柱に内蔵した実大フレームの静的載荷実験の結果
GBRCの建築技術性能証明評価概要報告書 GBRC 性能証明 第11-20号
Built-in Damper(BiD)フレーム工法-ダンパーを柱に内蔵するアウトフレーム型制振補強工法-
トグル制震ブレース(E&CS*1)
本プログラムでは、トグル制震ブレースの適用に関して、装置の適用範囲の判断は行いません。したがって設計者は、解析から得られた応答値と装置の限界値を別途比較し、装置の適用範囲内であることを確認することが最低限必要です。
ここでトグル制震ブレースには幾何学的非線形性などの特有の条件があり、微小変形解析による本プログラムから得られた応答値をそのまま装置の限界値と比較することができません。装置の適用範囲の確認においては、解析から得られた応答値を、幾何学的非線形性の考慮を含む特殊な割り増し計算を行った後に装置の限界値と比較する必要があります。
この特殊な割り増し計算を含めた装置の適用範囲の確認方法については、(株)E&CS*1が提供する「トグル制震構法 技術情報シート」(http://www.kk-ecs.co.jp/engineering_sheets/)を参照してください*2。また同技術情報シートには装置の適用範囲の他にも技術的な情報が示されています。
*1 (株)E&CSは、「トグル」および「トグル制震ブレース」について、知的財産権を所有する飛島建設(株)より許諾を受けて使用しています。
*2 「トグル制震構法 技術情報シート」の適用範囲を超える設計を行った場合、(株)E&CSから装置の提供ができない場合があります。
【腕軸剛性】
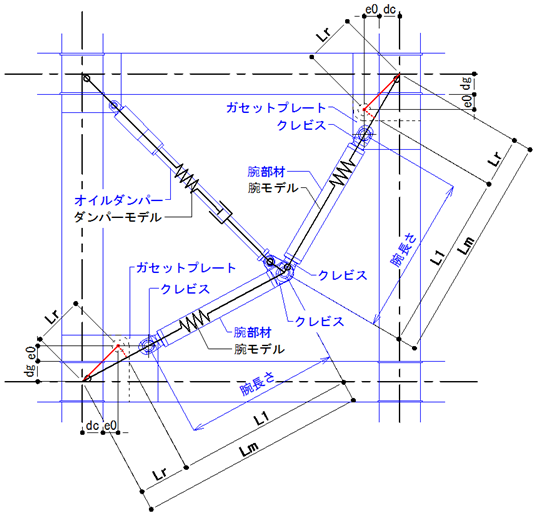
腕軸剛性K1 :以下の計算により算出する。
1/K1=1/(A・Es/Lu)+1/Kcf+1/Kcm+1/Kg
$A$ :腕鋼管断面積
$Es$ :鋼材のヤング係数
$Lu$ :腕鋼管の長さ $Lu=L1$-(腕両端クレビス長さの和)
クレビス長さ :腕鋼管端とクレビスピン穴芯間長さ
$L1$ :剛性計算用腕長さ $L1=Lm-Lr$
$Lm$ :トグルモデル腕長さ(構造芯節点とトグル中央交点ピン穴芯間長さ)
$e0$ :柱面または梁面とピン穴芯間の最小長さで以下による
| トグル種類 | e0値 |
|---|---|
| 850KNダンパー用 | 165mm |
| 500KNダンパー用 | 135mm |
| 300KNダンパー用 | 100mm |
$Lr$ :e0寸法で決まるピン穴芯と構造芯節点間の最小長さ
$dc$ :柱面と構造芯間長さで以下とする $dc$=(左右の柱成寸法の平均)/2
$dg$ :梁面と構造芯間長さで以下とする $dg$=(上下の梁成寸法の平均)/2
$Kcf$ :建物架構側クレビスの軸剛性
$Kcm$:トグル中央節点側クレビスの軸剛性
$Kg$ :ガセットプレートの軸剛性
【腕構面内曲げ剛性】
腕構面内曲げ剛性I1 : 以下の計算により算出する
$I1$ = $(Lm/L1)_3・I$
$I$ : 腕鋼管の断面二次モーメント
【腕構面内せん断剛性】
腕構面内せん断剛性As1 : 以下の計算により算出する
$As1$ = $(Lm/L1)・As$
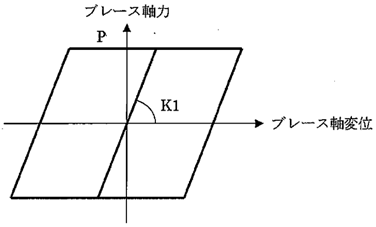
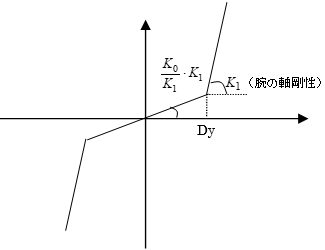
【腕軸非線形特性】
腕軸の非線形特性は以下のように設定します。履歴則は逆行型とします。
【ダンパー非線形特性】
ダンパーの非線形特性はリリーフ荷重によるバイリニアとして設定します。